
A common question we get ask is “What motor controller should I use?”. There are two main criteria you need to look at: communication protocols and current capacity. The first isn’t a big issue with modern motor controllers since most have such a wide range of inputs spanning analog control, R/C, to serial. However, it’s worth noting that it doesn’t matter how much current the motor controller can pump out if you can’t send it commands. The current requirements for your motor controller are going to be highly dependent on both what motor your using and how hard you’re planning on pushing the motors.
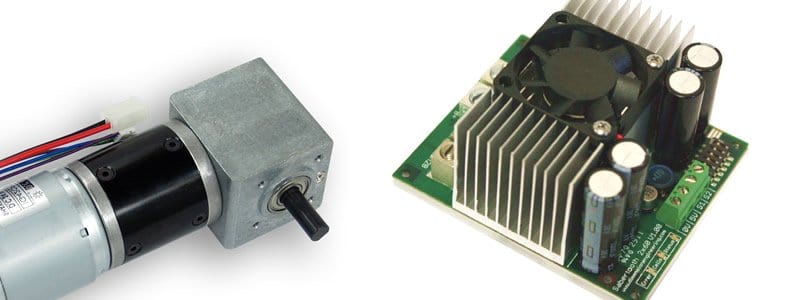
Ideally, you want your motor controller to survive through motor failure. Meaning not only should the motor controller be able to handle the motor current under a light load but also to the point where the motor stalls out. As an example, let’s take a look at the current data and curves for our IG42 right angled motors
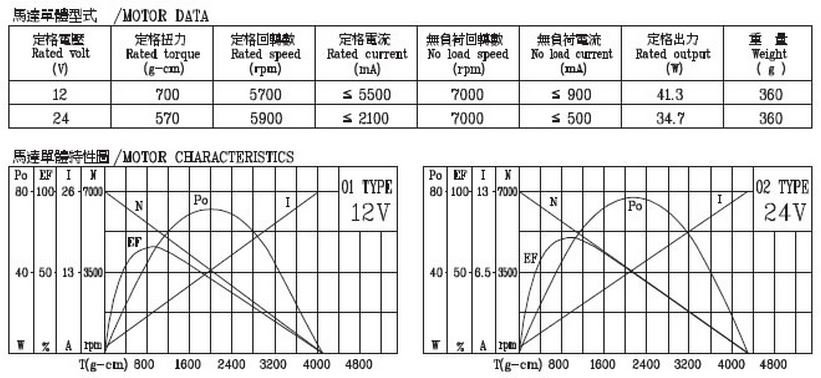
In the table above we can see some basic information such as no-load current (free spinning motor) and the rated current. It should be noted that this rated current is not the total current of the motor. This is described in the charts.
The charts provide us power, efficiency, current consumption, and output speed curves over the range of exerted torque of the motor. The left of the chart is when the motor is free-wheeling with no load. At this point we can see that the motor is spinning at it’s maximum value of 7000rpm, consuming 500mA and very little power. As the motor is loaded we can see the current consumed going up (I), the motor slowing down (N), our efficiency peaking (EF), and our output power peaking (Po). The output power peaks and drops back down to 0 because the motor is stalling out. From this graph we can see that the peak stall current is 13A and a nominal current of 6.5-7A. This means that you are going to want to select your motor controller such that your rated output current is between the peak output power and the stall current. The motor controller should also be able to handle the motor stalling out. For this example I would suggest a motor controller rated at least 10A with a peak over 15A.
Based on the table below, our suggestion would be the Sabertooth 2×12 (TE-091-212) if the robot is lightly loaded or a Sabertooth 2×25 (TE-091-225) if you’re planning on putting some load on your motors.
Available Motor Controllers
Dimension Engineering Two Channel Motor Controllers
| Item | Nominal Current | Peak Current |
|---|---|---|
 | ||
 | ||
 | ||
 |
Dimension Engineering Single Channel Motor Controllers
| Item | Nominal Current | Peak Current |
|---|---|---|
 SyRen 10A Regenerative Motor Driver SyRen 10A Regenerative Motor Driver(TE-098-110) | 10A | 15A |
 SyRen 25A Regenerative Motor Driver SyRen 25A Regenerative Motor Driver(TE-098-125) | 25A | 45A |
 SyRen 50A Regenerative Motor Driver SyRen 50A Regenerative Motor Driver(TE-098-150) | 50A | 100A |
#techthursday #Motorcontrol


{kind=link}