
Technical Thursday #043;
Today we want to write about RoboteQ’s speed controller with encoder input like the RoboteQ XDC2460. This motor controller can handle 150 amps per channel and you can combine it with the DG-158 wheel chair motors. We recommend installing our, custom direct drive shafts or if you need custom sprockets you can fill our custom fabrication request. When you choose the wheel chair motors make sure to select the option that comes with the optical encoders.
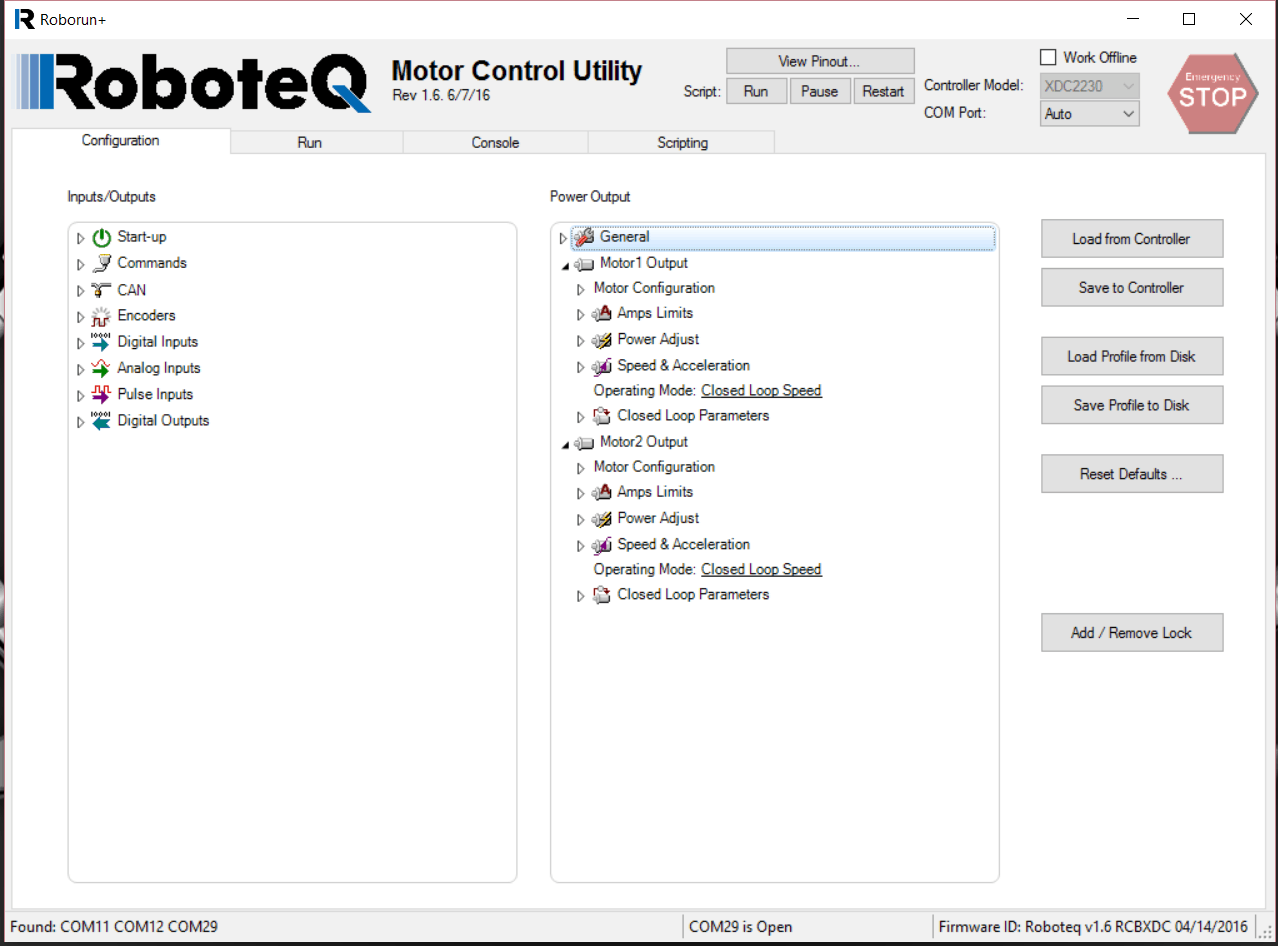
The speed control is very useful when you want to drive at certain speed or drive straight. For this tutorial you may need the RoboteQ XDC2460, the DG-158 wheel chair motors with optical encoders. Download and install RoboRun PC Utiliy. Once you install and connect the RoboteQ to your computer you should see something like this:
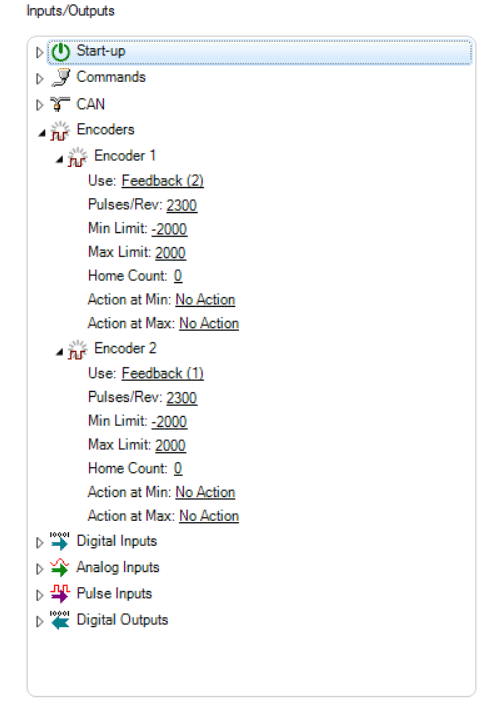
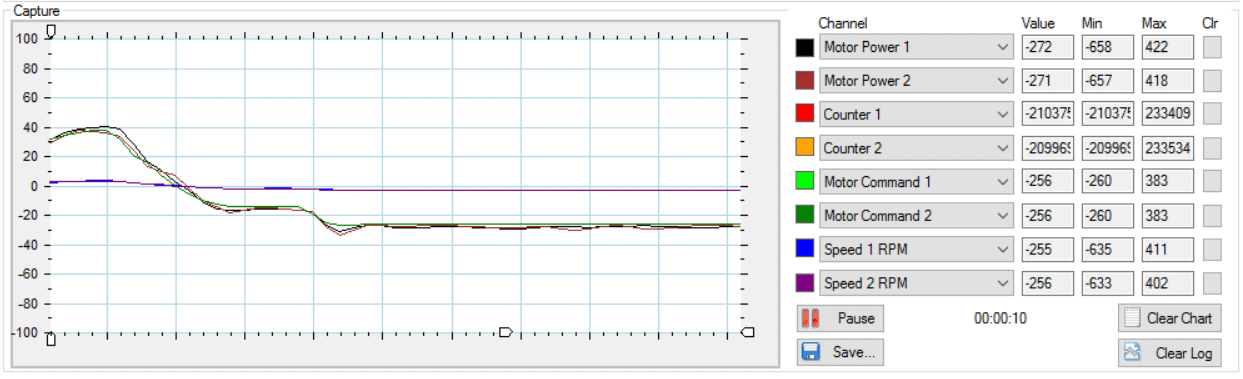
For the connections of signals and power please refer to datasheet. You may need to configure the encoder 1 to feedback 2 and encoder 2 to feedback 1. Go to Run tab, give it a command and measure the actual speed of the motor with a tachometer and make sure both counters are counting in the same direction and wheels are turning the same direction. For example you are giving a command of 200 and you are measuring 300 rpm you need to configure the pulses per revolution until you see the command and rpm close to same value. Here an example of pulse per revolution set up.:
After you have the pulse per revolution and command working together go to Motor 1 Output > Speed and acceleration > operating mode, select closed loop speed. Here an example of the motor configuration.
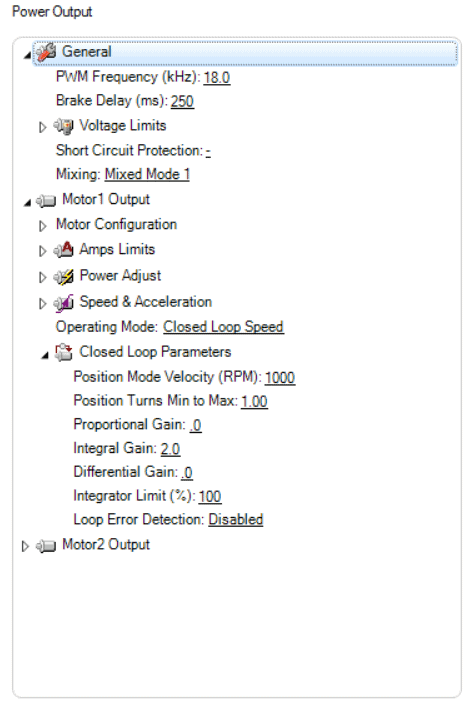
Do the same to Motor 2 Output. Here an example of how the output should look.

{kind=link}